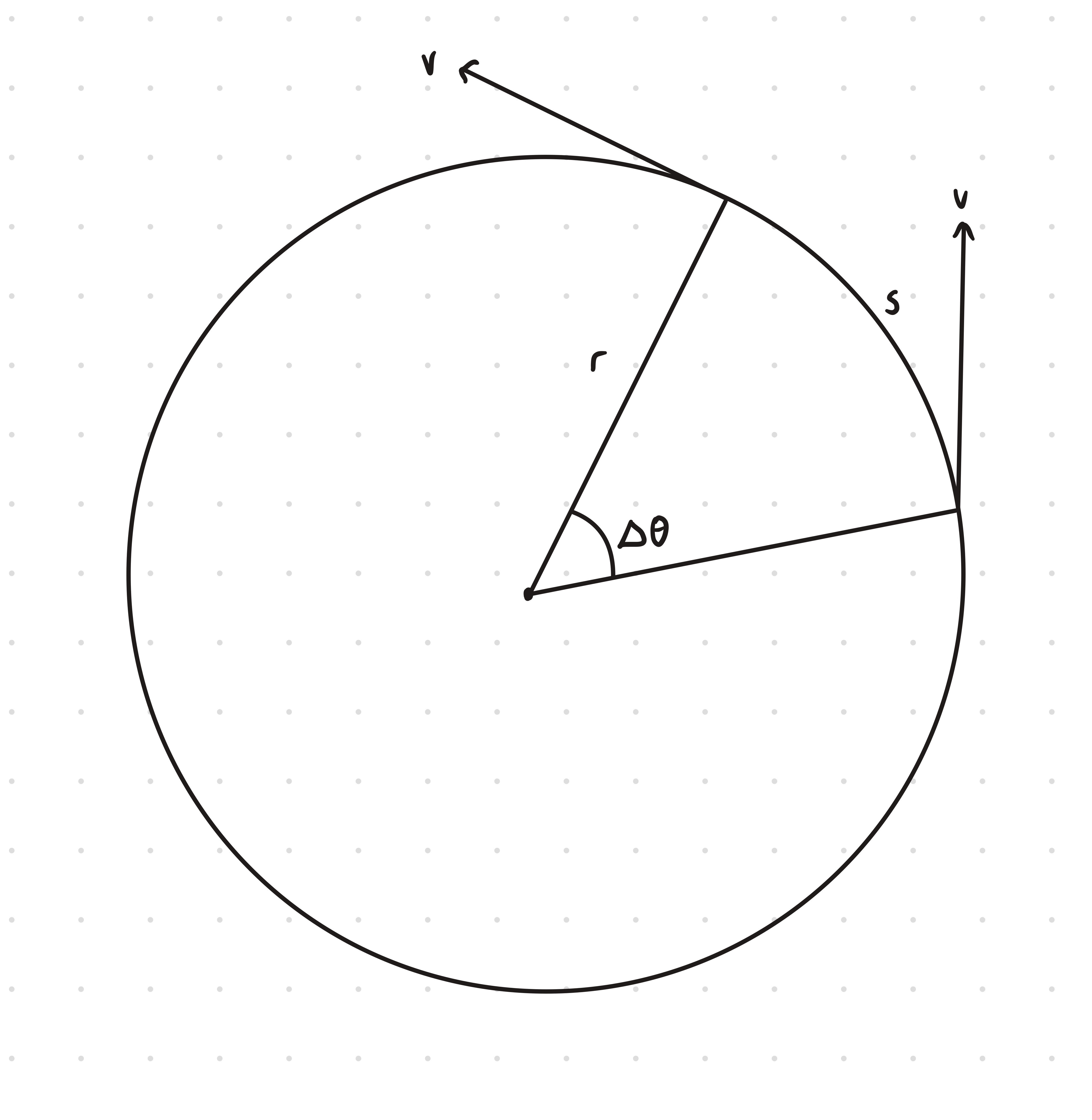
Level 1/Rotational Dynamics2. Circular Motion----- Derivations s=Δθrs=vΔts = \Delta \theta r \\ s = v \Delta ts=Δθrs=vΔt vΔt=Δθrv \Delta t = \Delta \theta r \\vΔt=Δθr vr=ΔθΔt\dfrac{v}{r} = \dfrac{\Delta \theta}{\Delta t}rv=ΔtΔθ Angular Velocity (www) (rad s−1s^{-1}s−1) by definition w=ΔθΔtw = \dfrac{\Delta \theta}{\Delta t}w=ΔtΔθ so limΔt→0=dθdt\lim_{\Delta t \to 0} = \dfrac{d\theta}{dt}Δt→0lim=dtdθ Useful Equations w=θt,s=θt,v=wrw = \dfrac{\theta}{t}, \quad s = \theta t, \quad v = wrw=tθ,s=θt,v=wr a=v2r=w2ra = \dfrac{v^2}{r} = w^2ra=rv2=w2r F=mv2r=mw2rF = \dfrac{mv^2}{r} = mw^2rF=rmv2=mw2r very useful to memorise 1. IntroductionStudy of circular motion, angular momentum, and torque3. Angular Acceleration-----