3. Angular Acceleration
-----
Acceleration
A vector quantity that describes how the angular velocity of an object changes with time
For an object moving in a circle, acceleration can be decomposed into two components
- Tangential Acceleration — changes the magnitude of the angular velocity
- Radial (Centripetal) Acceleration — points toward the centre of the circular path and changes the direction of the velocity
Deriving and
take the derivative with respect to time
this can be rewritten as
Angular Acceleration ()
Tangential Acceleration (a_t)
Contants Angular Acceleration
integrate both sides
if we solve for
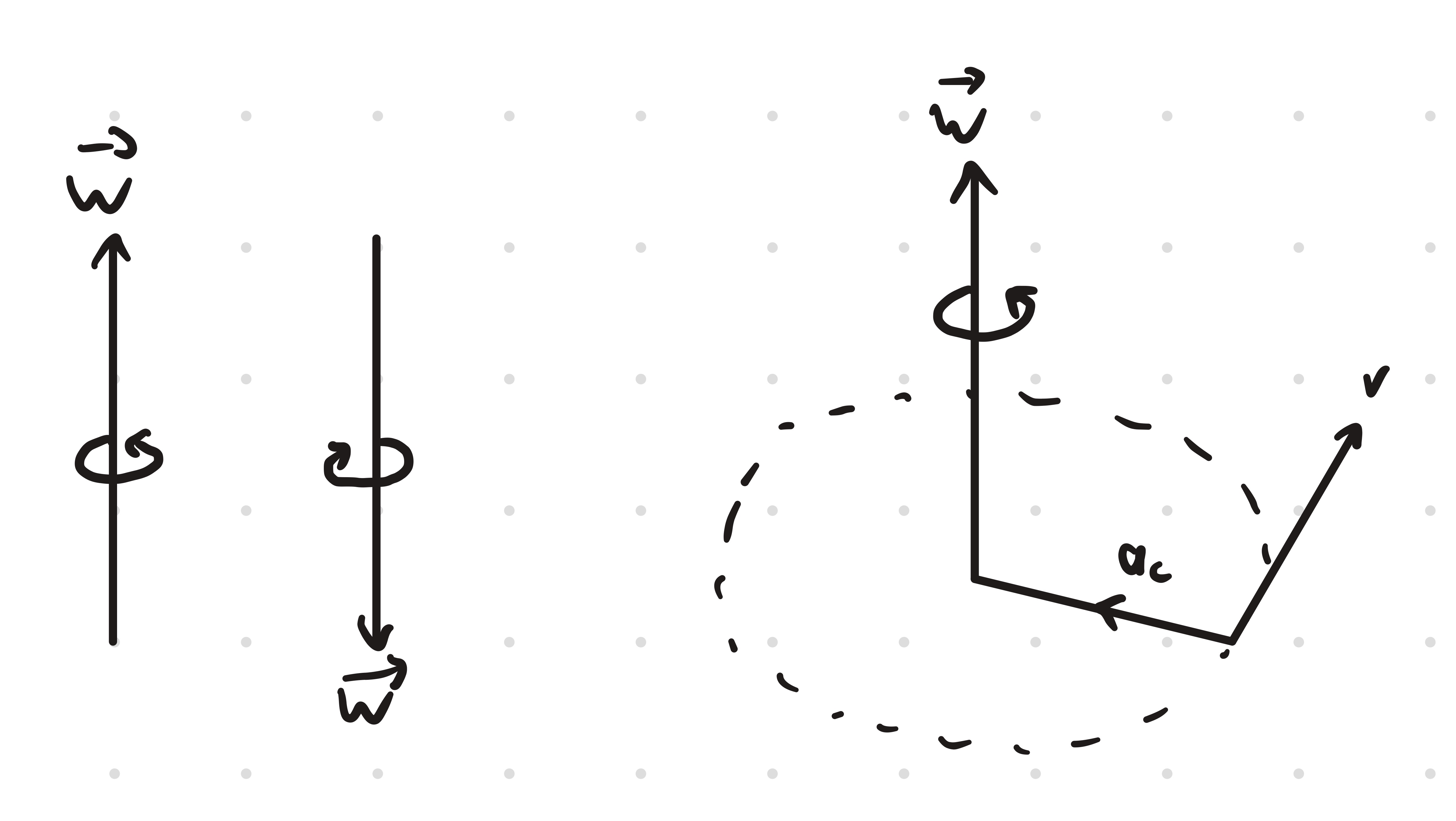
Representing
Angular velocity can be denoted by the right hand rule